Údržba podmořských vrtů i potrubí táhnoucího se po oceánském dně je nezbytná, ale nákladná činnost, která vyžaduje nasazení většího počtu zaměstnanců i techniky. Autonomně operující robot Aquanaut na druhou stranu si žádá menší péči ze strany člověka a má i další výhody.
Systémy používané dosud operují s dálkově ovládanými roboty, jejich obsluha navíc zaměstná průměrně až 7 lidí. Cílem startupu Houston Mechatronics Inc. (HMI) je v budoucnu dosáhnout opačného poměru. „Myslíme si, že jeden operátor by mohl ovládat až 7 Aquanutů,“ tvrdí Nic Radford, jeden ze spoluzakladatelů HMI a zároveň i jeho šéftechnolog.
 Zdroj: Houston Mechatronics Inc.
Zdroj: Houston Mechatronics Inc.
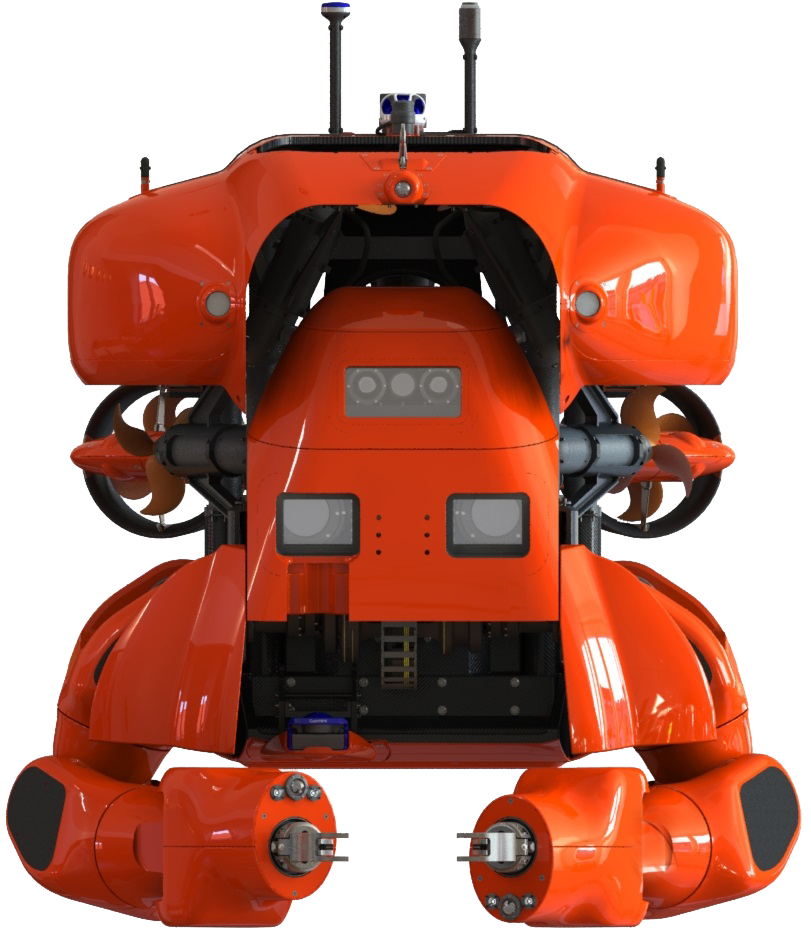
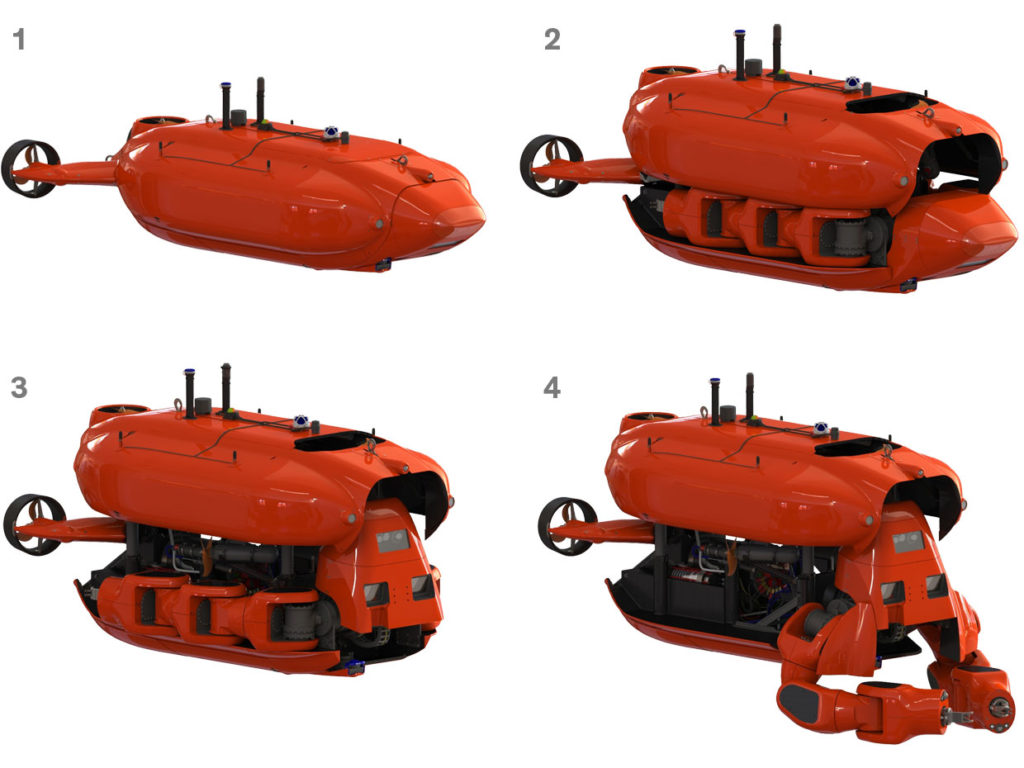
A jak by ten úžasný vynález měl fungovat? Aquanaut stejně jako slavní transformeři operuje ve 2 základních modech. Když se přibližuje k místu výkonu opravy, nachází se ve složeném tvaru – ze všeho nejvíc připomíná podvodní skútr. Do částečně humanoidní podoby se rozloží až ve druhé fázi, tj. když zjišťuje míru poškození a následně provádí opravy. Z „plováku“ se v ten moment nadzvedne horní panel, robot vystrčí ruce vybavené nástroji určenými k mechanické manipulaci a na přední část se nasune pomyslná hlava disponující řadou senzorů.
Velkou předností Aquanauta by měla být jeho vysoká míra autonomie. Nasazení opravářských robotů nyní vyžaduje vyplutí podpůrné lodi a ovládání na místě skrze kabelové propojení. Vodního transforema bude sice stále kontrolovat operátor, kterému budou náležet i důležitá, zásadní rozhodnutí v případě oprav, většinu úkonů by měl robot ale zvládat na dálku sám – počínaje dopravou na místo a průzkumem prostředí i míry poškození konče. Tím se sníží nároky na lidské ovládání, ale třeba i nutnost výměny vysokého objemu dat, kdy ovládání zatím je závislé v každý moment na informacích posílaných robotem.
 Zdroj: Houston Mechatronics Inc.
Zdroj: Houston Mechatronics Inc.
Samozřejmě že ne všichni jsou nadšení z představy, že o citlivou infrastrukturu se bude starat výrazně autonomní robot. „Mám obavy z poruch, ke kterým by mohlo dojít v průběhu oprav, ty mohou mít finanční i environmentální dopady,“ prohlásil Matthew A. Franchek, profesor strojírenství na University of Houston a ředitel Mezinárodního výzkumného institutu podmořské techniky (International Subsea Engineering Research Institute). „Ačkoli jde o vzrušující technologii, musí nám ještě dokázat, že to opravdu bude fungovat.“
Autor: Petr Pláteník